Custom Scalar Products for Shape Gradient Computation#
Problem Formulation#
In this demo, we show how to supply a custom bilinear form for the computation of the shape gradient with cashocs. For the sake of simplicity, we again consider our model problem from Shape Optimization with a Poisson Problem, given by
For the initial domain, we use the unit disc \(\Omega = \{ x \in \mathbb{R}^2 \,\mid\, \lvert\lvert x \rvert\rvert_2 < 1 \}\) and the right-hand side \(f\) is given by
Implementation#
The complete python code can be found in the file
demo_custom_scalar_product.py,
and the corresponding config can be found in config.ini.
Initialization#
The demo program closely follows the one from Shape Optimization with a Poisson Problem, so that up
to the definition of the ShapeOptimizationProblem, the code is identical to the one in
Shape Optimization with a Poisson Problem, and given by
from fenics import *
import cashocs
config = cashocs.load_config("./config.ini")
mesh, subdomains, boundaries, dx, ds, dS = cashocs.import_mesh("./mesh/mesh.xdmf")
V = FunctionSpace(mesh, "CG", 1)
u = Function(V)
p = Function(V)
x = SpatialCoordinate(mesh)
f = 2.5 * pow(x[0] + 0.4 - pow(x[1], 2), 2) + pow(x[0], 2) + pow(x[1], 2) - 1
e = inner(grad(u), grad(p)) * dx - f * p * dx
bcs = DirichletBC(V, Constant(0), boundaries, 1)
J = cashocs.IntegralFunctional(u * dx)
Definition of the scalar product#
To define the scalar product that shall be used for the shape optimization, we can
proceed analogously to Neumann Boundary Control and define the corresponding
bilinear form in FEniCS. However, note that one has to use a
fenics.VectorFunctionSpace with piecewise linear Lagrange elements, i.e.,
one has to define the corresponding function space as
VCG = VectorFunctionSpace(mesh, "CG", 1)
With this, we can now define the bilinear form as follows
shape_scalar_product = (
inner((grad(TrialFunction(VCG))), (grad(TestFunction(VCG)))) * dx
+ inner(TrialFunction(VCG), TestFunction(VCG)) * dx
)
Note
Note that we cannot use the formulation
shape_scalar_product = inner((grad(TrialFunction(VCG))), (grad(TestFunction(VCG))))*dx
as this would not yield a coercive bilinear form for this problem. This is due to the fact that the entire boundary of \(\Omega\) is variable. Hence, we actually need this second term.
Finally, we can set up the ShapeOptimizationProblem and solve it with the lines
sop = cashocs.ShapeOptimizationProblem(
e,
bcs,
J,
u,
p,
boundaries,
config=config,
shape_scalar_product=shape_scalar_product,
)
sop.solve()
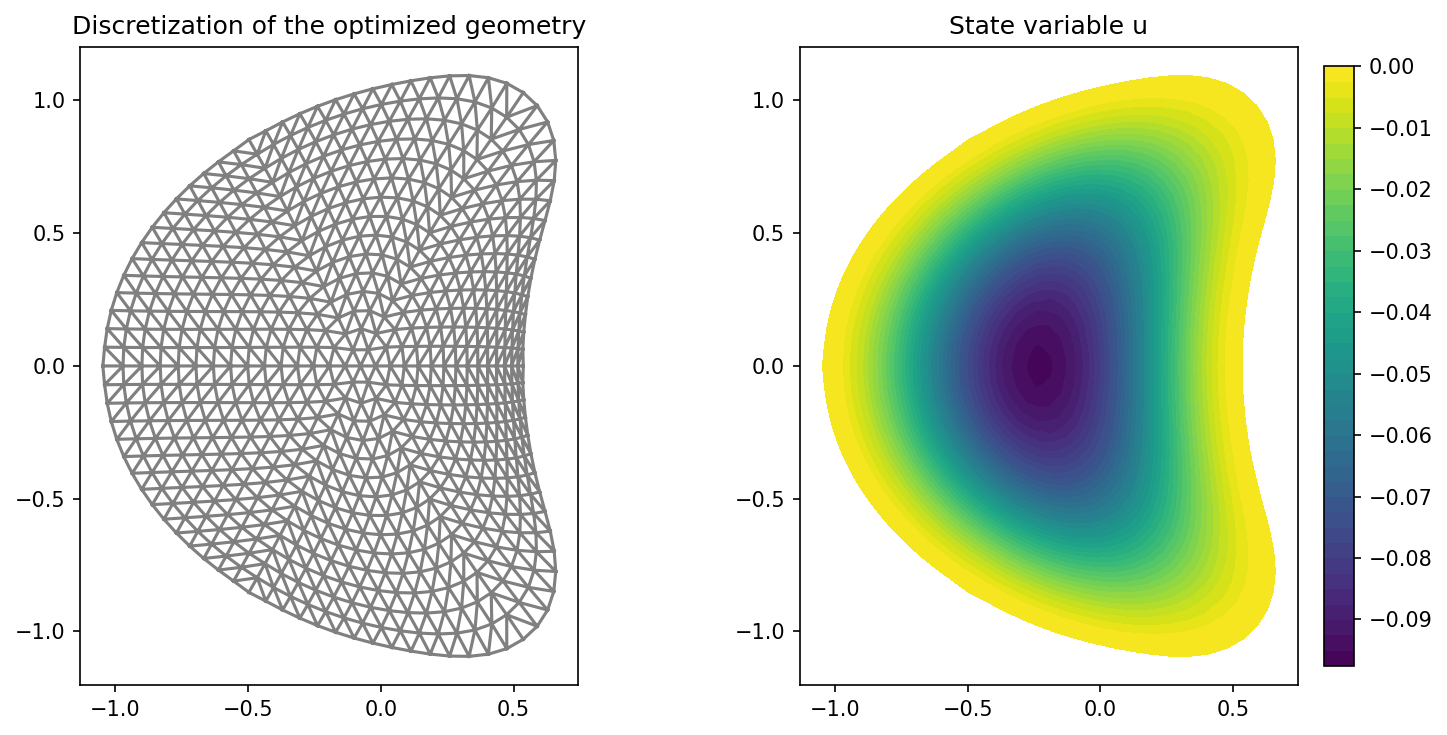
We visualize the result using matplotlib
import matplotlib.pyplot as plt
plt.figure(figsize=(10, 5))
ax_mesh = plt.subplot(1, 2, 1)
fig_mesh = plot(mesh)
plt.title("Discretization of the optimized geometry")
ax_u = plt.subplot(1, 2, 2)
ax_u.set_xlim(ax_mesh.get_xlim())
ax_u.set_ylim(ax_mesh.get_ylim())
fig_u = plot(u)
plt.colorbar(fig_u, fraction=0.046, pad=0.04)
plt.title("State variable u")
plt.tight_layout()
# plt.savefig('./img_custom_scalar_product.png', dpi=150, bbox_inches='tight')
The result of the optimization looks like this